Real Time Positioning and Collision Avoidance with Radar Sensors
Radar Enables High-Integrity Automation for Terminals
Position and distance measurement in ports are key applications of our KY-LOC and KY-RAY product families. Movement of any container handling equipment (CHE, such a ship-to-shore cranes, stacking cranes, portal cranes, straddle carrier, terminal tractors, reach stackers, empty handlers) or bulk handling ship unloaders are determined reliably and maintenance-free, even next to and under massive STS cranes.
The sensors continue to operate interruptedly under challenging weather conditions like rain, fog, snow, or dust.
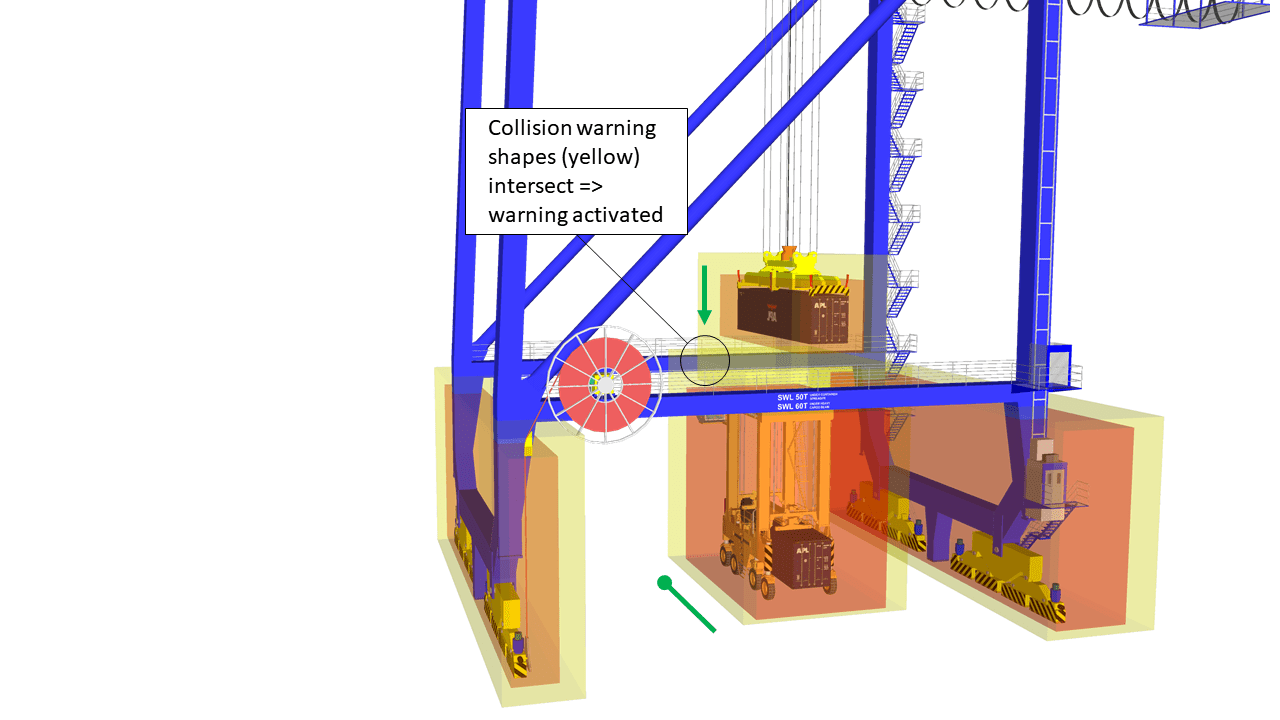
Collisions are avoided by continuously measuring the position and monitoring the environment of the respective CHE. Warning messages to CHE operators when coming close to other CHE or to protected infrastructure (e.g. light poles, power connectors) increase the operational safety and avoid any personal or equipment damage and associated interruptions in operations.
")
")
")
")
")
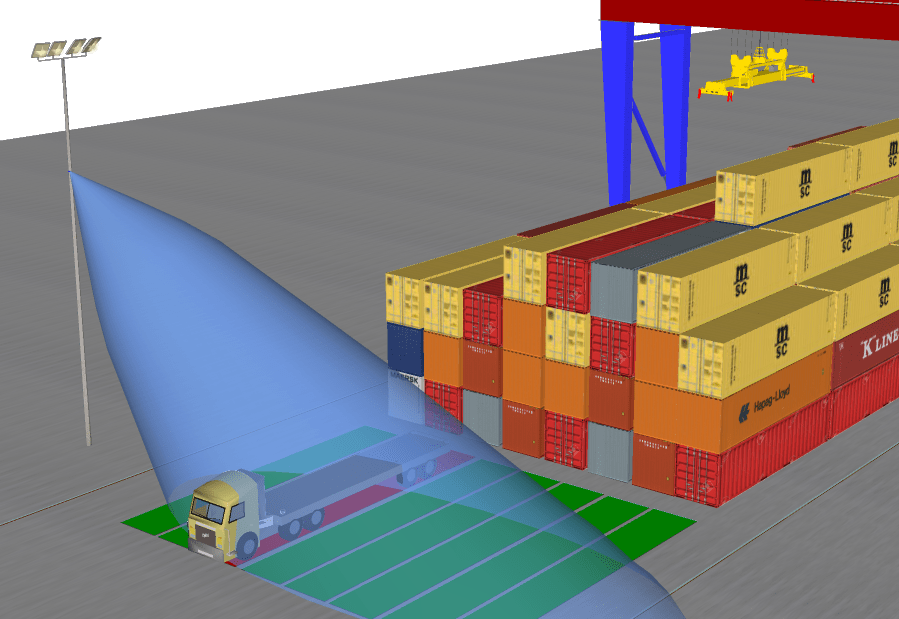
Zone Surveillance
")
Occupation of container handover zones
(Click to enlarge)
")
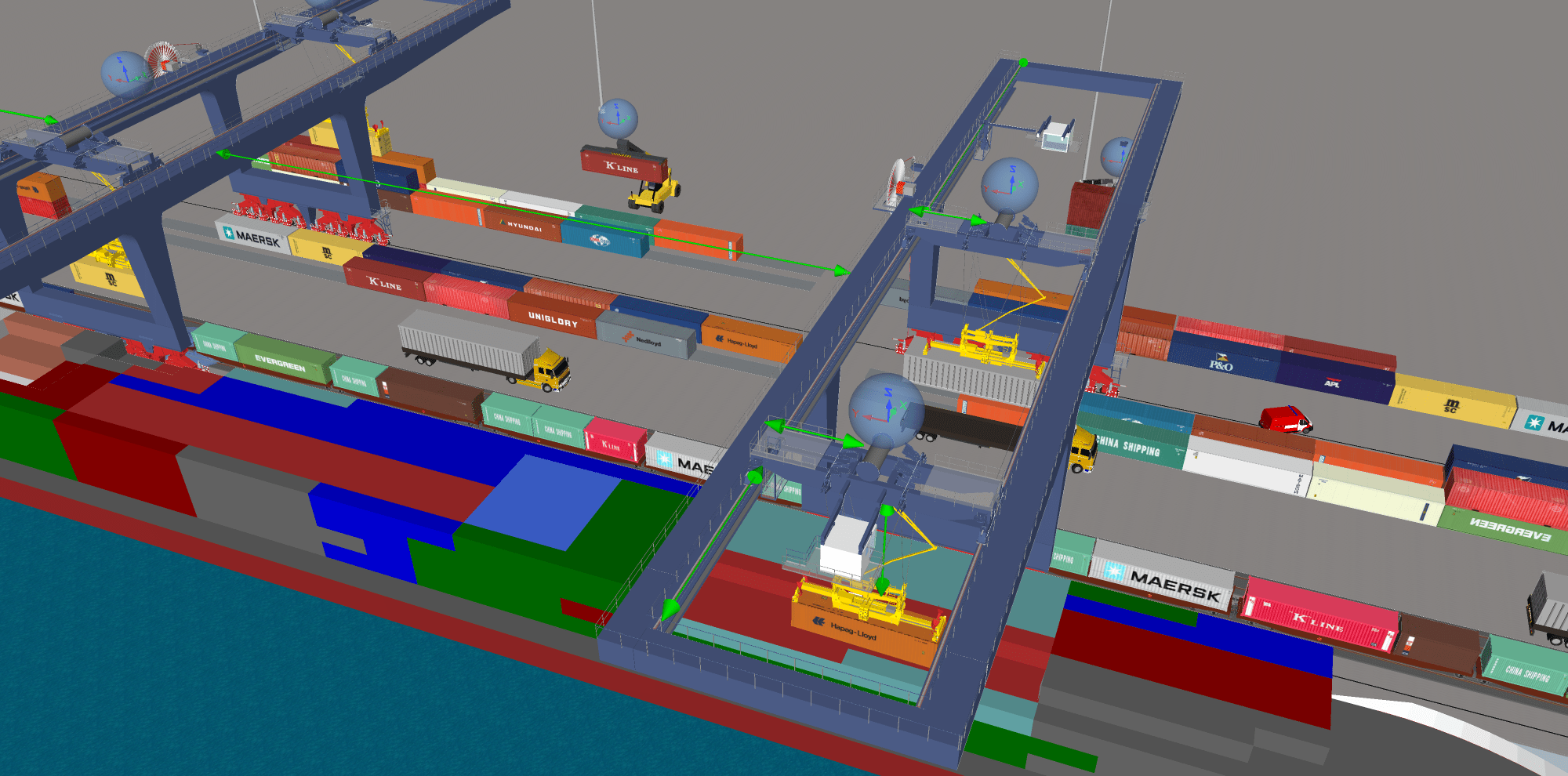
Ship unloader collision prevention
(Click to enlarge)
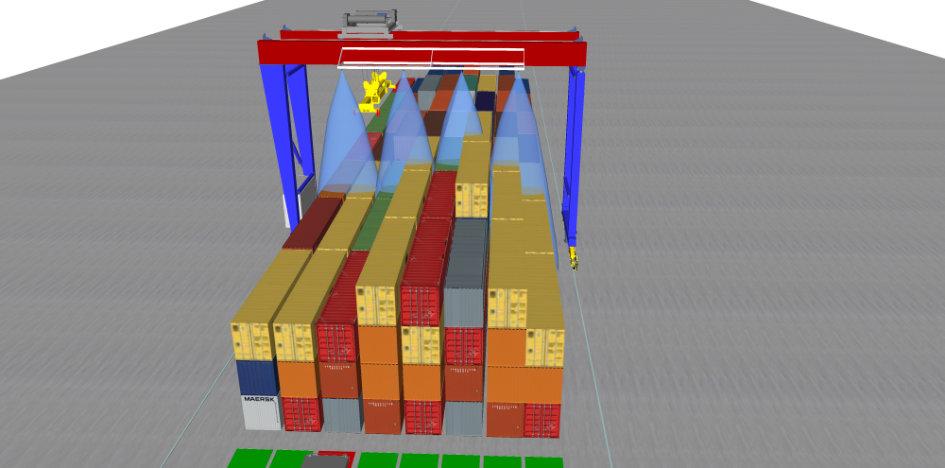
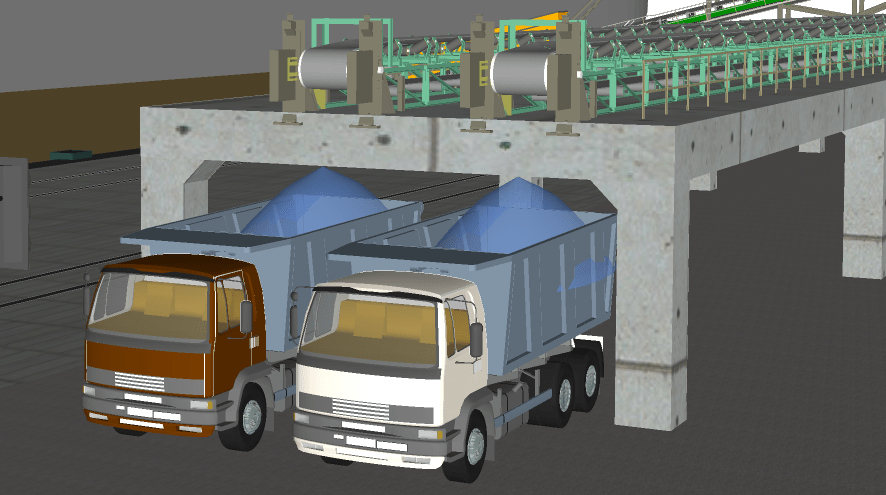
Container Stack Profile and Filling Level
A very high resistance to environmental challenges allows high process intergity and low operational cost.
")
Movement validation of belt conveyors
(Click to enlarge)
")
")
")
")
1D Position and Distance Measurement
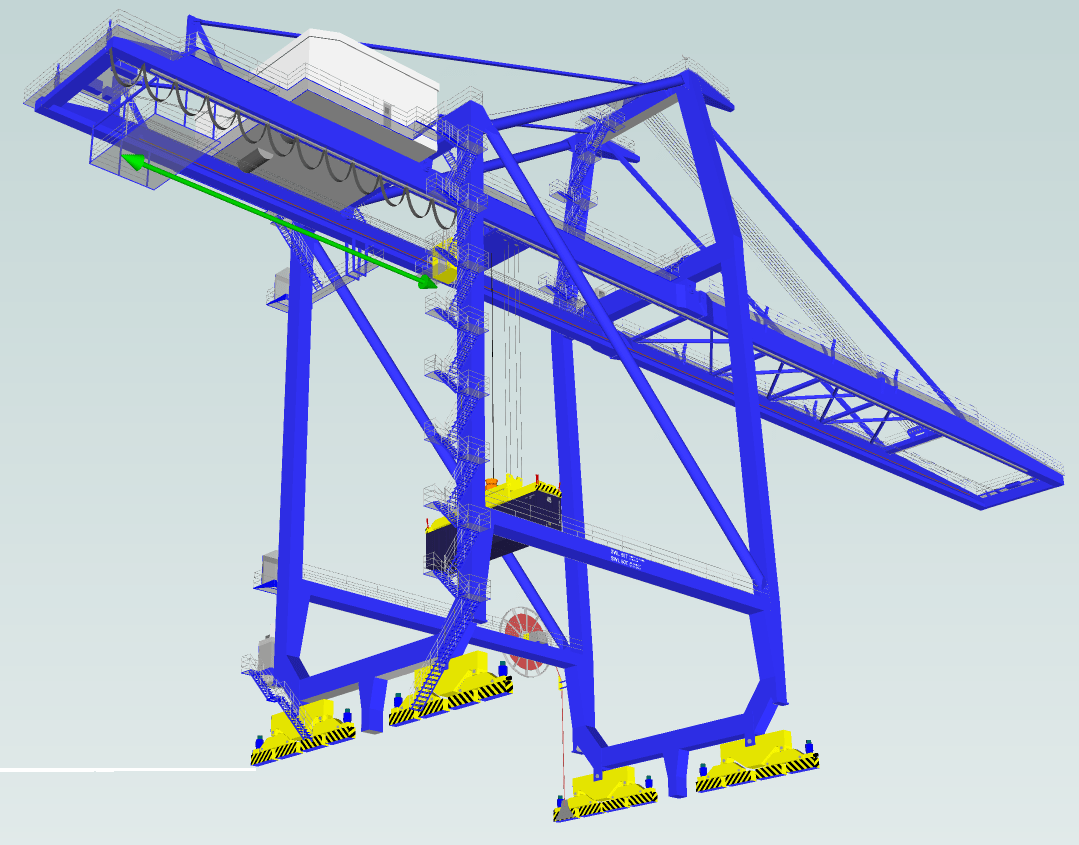
KY-LOC 1D.02.02 is an ideal solution for new and retrofitted STA crane trolley position measurement. The sensor data is always precise, independent of any lengthening of ropes driving the trolley - maintenance-free and without continuous readjustment.
")
Trolley position measurement on STS cranes
(Click to enlarge)
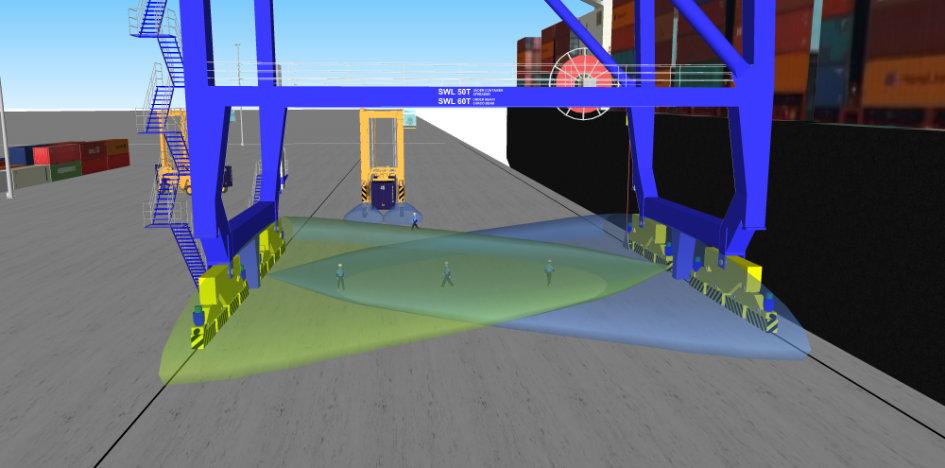
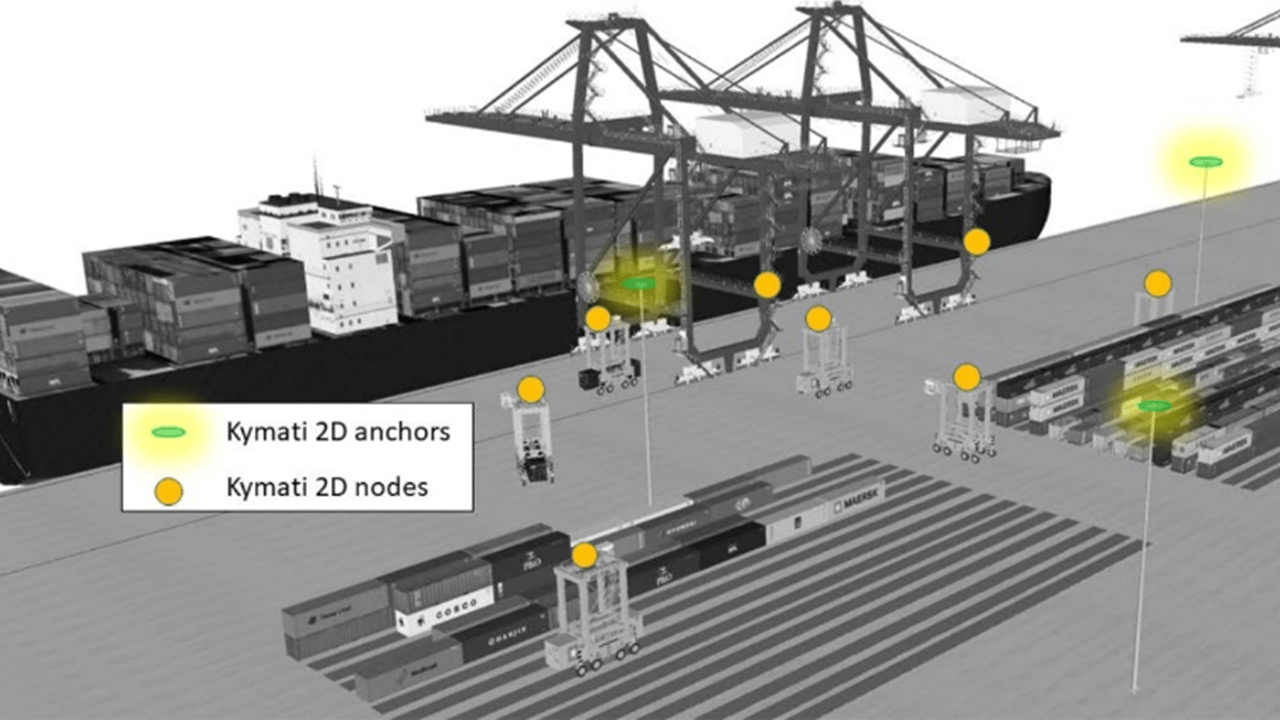
2D Position Measurement and Collision Avoidance
So-called 2D anchors are mounted on existing light poles or buildings. The vehicle receivers, the 2D nodes, are typically installed on the roof of the positioned vehicle and receive the Radar location signals of the anchors.
With an optional onboard Kymati radio device, all CHE can emit their own movement data and their physical shape over the airwaves. All other CHE do the same. The onboard radio device can hear all messages over the air that are close enough. Each CHE now has a clear picture of its own movement and the movement of other equipment near by and can determine its own collision risk, in order to slow down or stop its movement(s). Additionally, permanent and temporary obstacles can be entered into a database that is repeatedly updated on all CHE. These obstacles (hatch covers, light poles, temporary construction works) are also considered by the protection algorithm. This collision avoidance functionality does not have a single point of failure, and is not affected by the latency of any network connection.
")
Collision warning between spreader/container and straddle carrier
(Click to enlarge)
")
")
")
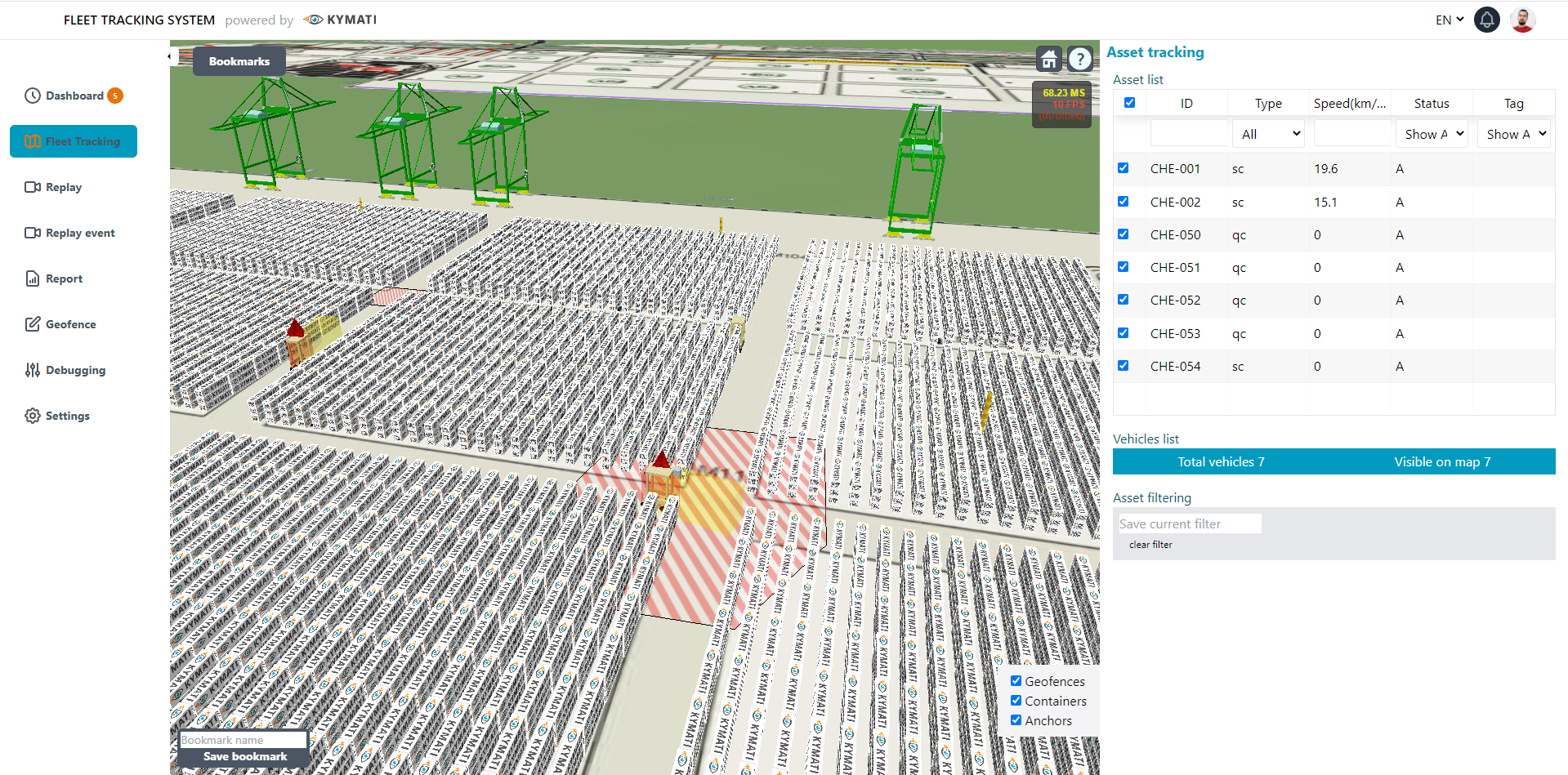
OMNI visualization - screenshot
(Click to enlarge)
Browser based 3D Visualization
All movement and messages are recorded in the databse with their time stamp. Any situation can be viewed live or replayed from any chosen 3D viewport.
OMNI can send important messages by email. The entire CHE fleet can be managed in OMNI - vehicle groups, service intervals, driver IDs, typre pressure, fuel reserve, shock, equipment warnings, etc.).
The number of simultaneos web users is not limited and different user groups can be assigned different levels of system access.
 Contact us!
Contact us! {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}